| Description |
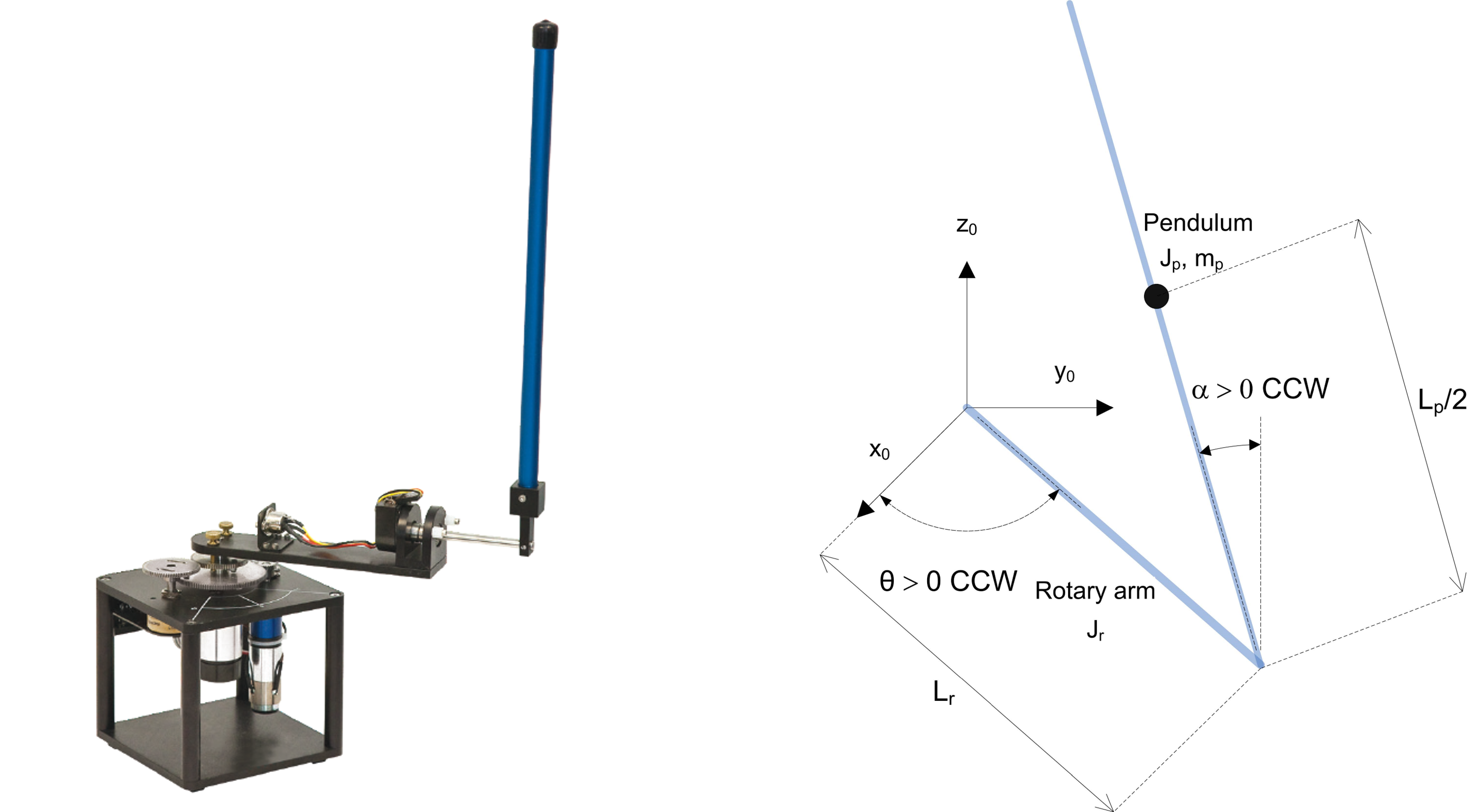
| The rotary pendulum module consists of a flat arm which is instrumented with a sensor at one end such that the sensor shaft is aligned with the longitudinal axis of the arm. A fixture is supplied to attach the pendulum to the sensor shaft. The opposite end of the arm is designed to mount to a Quanser rotary servo plant (SRV02) resulting in a horizontally rotating arm with a pendulum at the end. |
|
|
Rotary Arm
\[\left(m_{p}L_{r}^{2}+\frac{1}{4}m_pL_p^{2}-\frac{1}{4}m_p L_p^2 cos^2(\alpha)+J_r \right)\ddot{\theta}
-\left(\frac{1}{2}m_p L_p L_r cos(\alpha) \right)\ddot{\alpha}\\
\qquad\qquad\qquad\qquad\qquad\qquad
+\left(\frac{1}{2}m_p L_p^2 sin(\alpha) cos(\alpha) \right)\dot{\theta}\dot{\alpha}
+\left(\frac{1}{2}m_p L_p L_r sin(\alpha)\right)\dot{\alpha}^2
=\tau-B_r \dot{\theta}\]
Pendulum
\[\left(-\frac{1}{2}m_p L_p L_r cos(\alpha) \right)\ddot{\theta}
+\left(J_p+\frac{1}{4}m_pL_p^2 \right)\ddot{\alpha}\qquad\qquad\qquad\qquad\qquad\\
\qquad\qquad\qquad\qquad\qquad\qquad\qquad
+\left(-\frac{1}{4}m_p L_p^2 sin(\alpha)cos(\alpha) \right)\dot{\theta}^2
-\frac{1}{2}m_pL_pgsin(\alpha)=-B_p\dot{\alpha}\]
Linearizing
\[f_{lin}=f(z_0)+\left. \frac{\partial f(z)}{\partial z_1}\right|_{z=z_0}(z_1-a)
+\left. \frac{\partial f(z)}{\partial z_2}\right|_{z=z_0}(z_2-b)\\
(1) \left( m_p L_r^2 +J_p \right) \ddot{\theta}
-\left(\frac{1}{2}m_pL_pL_r \right) \ddot{\alpha}=\tau-B_r\dot{\theta}
\qquad\qquad\qquad\qquad\qquad\qquad\\
(2)\left(-\frac{1}{2}m_p L_p L_r\right) \ddot{\theta}+ \left(J_p+\frac{1}{4}m_pL_p^2 \right)\ddot{\alpha}
-\left(\frac{1}{2}m_p L_pg\right)\alpha=-B_p\dot{\alpha}
\qquad\quad\ \ \]
State-space model
\[\begin{bmatrix}m_pL_r^2+J_r & -\frac{1}{2}m_pL_pL_r \\
-\frac{1}{2}m_pL_pL_r & J_p+\frac{1}{4}m_pL_p^2 \end{bmatrix}
\begin{bmatrix}\ddot{\theta}\\ \ddot{\alpha} \end{bmatrix}
=\begin{bmatrix}\tau-B_r\dot{\theta}\\
\frac{1}{2}m_p L_p g \alpha -B_p \dot{\alpha} \end{bmatrix}\]
\[x^{T}=\begin{bmatrix} \theta^T & \alpha^T & \dot{\theta}^T & \dot{\alpha}^T\end{bmatrix}\\ J_T=J_pm_p L_r^2+J_r J_p+\frac{1}{4}J_r m_p L_p^2\\ \tau=\frac{\eta_g K_g \eta_m k_t \left(V_m-K_g k_m \dot{\theta}\right)}{R_m}\\ \dot{x}(t)=\frac{1}{J_T}\begin{bmatrix}0&0&J_T&0\\ 0&0&0&J_T\\ 0&\frac{1}{4}m_p^2 L_p^2 L_r g & -\left(J_p+\frac{1}{4}m_pL_p^2 \right) \left(B_r+\frac{K_g^2 k_t k_m}{R_m}\right) & -\frac{1}{2}m_p L_p L_r B_p\\ 0&\frac{1}{2}m_p L_p g \left(J_r+m_pL_r^2\right) & -\frac{1}{2}m_pL_p L_r B_r-\frac{K_g^2k_tk_mm_pL_pL_r}{2R_m} & -\left(J_r+m_p L_r^2\right)B_p \end{bmatrix}x(t) \qquad\qquad\\ \qquad\qquad\qquad\qquad\qquad\qquad\qquad\qquad\qquad\qquad\qquad\qquad\qquad\qquad\quad +\frac{K_gk_t}{J_TR_m}\begin{bmatrix}0\\0\\J_p+\frac{1}{4}m_pL_p^2 \\ \frac{1}{2}m_pL_pL_r \end{bmatrix}V_m(t)\] |
| Publication |
|
1. Y.J. Kim, Y.G. Lee, S.H. Lee, O.M. Kwon,
"T-S fuzzy controller design for Rotary Inverted Pendulum with input delay using Wirtinger-based integral inequality",
The 22th Int. Conf. on Control, Automation and Systems 2022(ICCAS 2022), Busan, Korea, Nov.27 - Dec.1, 2022.
2. Y.J. Kim, Y.G. Lee, S.H. Lee, P. Selvaraj, R. Sakthivel, O.M. Kwon, "Design and experimentation of sampled-data controller in T-S fuzzy systems with input saturation through the use of linear switching methods", AIMS Mathematics, Vol. 9, No. 1, pp. 2389--2410, Jan 2023. |
|
Control Engineering Lab., School of Elec. Eng., CBNU
Copyright 2008 CEL Allrights reserved. Contact Us |